据美国幼儿教育学者莉莲·凯茨研究发现,很多孩子在学习的过程中,会因为某些原因逐渐产生对学习的无能感,并因此而丧失自信心,给别人的感觉是,这些孩子什...
2025-09-21 35
AMT技术范文(精选9篇)
关键词:AMT技术,控创,CRMS服务器
在经历了连续几年的爆发性增长之后,国内的风电市场正在进入一个平稳发展的新阶段。根据正在制定的“十二五”可再生能源规划,未来中国风电装机容量每年将会超过一千万千瓦。中国可再生能源协会风能专业委员会主任贺德馨认为,到2020年中国风电装机容量将达到1.5亿~2亿千瓦,占世界风电总装机容量的3%到5%。
Kontron从2005年开始一直关注风电的发展,并利用自身在工业计算和通信方面的丰富的产品线,为国内风电厂商提供支持。目前Kontron的上架式通信服务器产品(CRMS)以及4U尺寸的工业计算机在风电SCADA系统获得了广泛应用。
CRMS服务器
CRMS服务器是控创的一款以1U和2U尺寸提供抗恶劣环境、长生命周期保证的服务器产品。CRMS服务器外观如图1所示,该产品的以下特点尤其适合风电电控以及SCADA系统的应用。
(1) 长生命期保证(3年);
(2) 支持Intel AMT技术,强大的远程系统管理功能;
(3) 短尺寸强固机箱,灵活方便的安装形式,支持交直流电源,支持多种形式的前面板;
(4) 符合NEBS-3和ETSI标准并在相关实验室获得认证;
(5) 高可靠性:电源、风扇、磁盘可热替换,专有硬盘减震技术提高硬盘寿命,可选硬件RAID;
(6) 工业领先的性能功耗比。
基于CRMS服务器的风电SCADA系统
图2展示了采用Kontron CRMS作为数据库服务器在风电SCADA系统中的应用方案。在这个方案中,风场中的风机将运行数据通过冗余光纤网和交换机送到上层监控网络,在上层的数据库服务器中进行存储和处理。工程师站和操作员站负责组态、监控的任务,历史站存储趋势数据并提供查询访问接口。
适合大分布式系统的AMT技术
风电系统地域非常广,针对风电的分布式控制系统,其分布的尺度大大超过了其他发电形式或者其他工业应用对计算机的要求。这种大范围的分布式架构对远程启动、关机、维护、升级、故障诊断提出了新的要求。
Kontron CRMS服务器支持的Intel誖AMT技术为此种需求提供了很好的解决方案。Intel誖AMT是当前嵌入式的英特尔誖处理器和芯片组 (例如移动Intel誖GM45 Express或Intel誖Q45 Express芯片组) 的主要组成部分。对于管理通信,嵌入式主板可使用现有网络连接,从而无需额外布线。这样,控创采用英特尔誖AMT的标准嵌入式主板提供了标准化的平台,可基于系统清单、带外管理和安全管理实现远程应用程序有效且集中化的安装、管理和维护。
英特尔誖AMT的可行性
特别是在分布式应用(例如机场的自动化换领登机牌终端)中,如果必须执行任何安装或维护,则远程可检索系统清单和访问日志可提供巨大的帮助。每次启动系统时,当前硬件配置的所有相关详细信息存储在可远程访问的闪存上。通过额外的软件代理,还可存储软件配置。此外,存储访问日志,以便管理员可执行远程错误分析并更快地识别解决方案的可能性。即使这意味着必须更改BIOS参数、必须安装固件更新以及要调整或设置省电模式,也不再需要执行现场操作。这些操作可通过LAN串行 (SoL) 地从远程服务器执行,甚至可以实现远程BIOS更新。另外,通过网络执行扫描,可找到并寻址所有应用AMT的系统,无论这些系统当前是开还是关。这样可为初始安装提供巨大的优势:可安装主板,然后通过远程和自动访问分别初始化到应用程序中。
远程启动
Formula:(NH4)6H2W12O40.nH2O
(NH4)6H2W12O40.XH2O
(NH4)6H2W12O40
Physical & Chemical Properties :
> White or slightly yellow crystalline powder
> Soluble in water
applications:
AMT is used to manufacture a variety of catalysts in petrochemical industry and other tungsten compounds.It is also the main raw material of tungsten-based catalysts in refinery.Production Technology:
AMT can be made in different way, mainly:
1.Ammonium tungstate solution as raw material, solvent extraction or ion exchange method for AMT solution firstly, then evaporation and crystallization for AMT powder
2.Sodium tungstate solution as raw material, solvent extraction method
forAMT solution, then evaporation and crystallization for AMT powder
3Heating and dissociating APT to make some ammonium and crystal water loss, then getting water-soluble AMT, andevaporation & crystallization for AMT powder
电控机械式自动变速器 (AMT) 是在传统手动机械式变速器基础上加装电控执行机构和操纵系统组成的, 其核心是电子控制单元 (ECU) , 通过液压、气压或电机控制离合器和选换档执行机构的动作来实现汽车换档过程和起步的自动操作。AMT具有液力机械式自动变速器 (AT) 自动变速的优点, 又继承了传统机械式变速器的传动效率高、成本低的长处, 符合汽车产业的发展要求[1,2]。目前, 针对AMT的研究主要集中在换档策略分析、换档规律制定等方面, 而在执行机构的控制策略方面研究较少[3]。本文通过分析AMT执行机构特点及AMT换档过程, 制定了AMT摘档过程及挂档同步过程的控制策略, 并在MATLAB/Simulink软件中建立了控制策略模型, 最后在实验车上验证了控制策略的可行性。
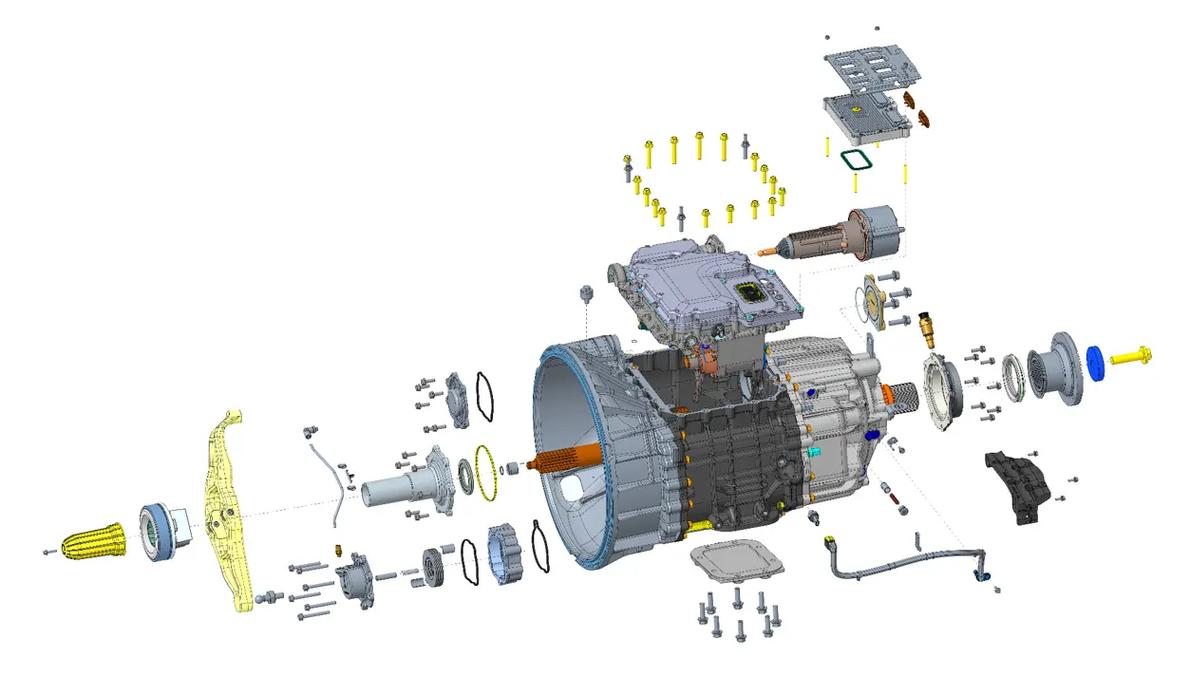
1 全电AMT选换档执行机构
全电AMT正交式选换档执行机构如图1所示, 选换档执行机构采用两个电机分别进行选档和换档操作, 该执行机构由换档电机、选档电机、选档轴、换档轴、选档拨头、换档拨头、选档位置传感器、换档位置传感器、壳体 (图中未显示) 等组成。
选换档执行机构的工作原理为:采用滚珠丝杠作为选档轴, 将选档电机的旋转运动变为选档拨头的直线运动, 进而带动换档拨头运动至目标档位槽中的空档位置, 完成选档动作;换档轴和拨头之间通过方轴、方孔连接, 滚珠丝杠将换档电机的旋转动作转换为往复运动, 通过套筒推动方轴进行旋转, 进而带动方孔上的换档拨头旋转, 推动同步器完成摘档及挂档动作。
2 AMT换档过程分析
AMT换档过程控制包括两个方面: (1) 由于换档过程具有较为严格的时序关系, 故需要进行逻辑控制; (2) 需要通过协调控制发动机和变速箱等一系列操作对换档性能进行控制[4]。
AMT换档过程的时序是:在接到换档指令后, 首先由TCU发送指令给ECU, 控制发动机扭矩降低, 待降到一定程度后, 离合器执行机构执行分离离合器的动作, 当离合器完全分开后, 换档电机执行摘档动作, 确认换档拨头回空档后, 选档电机执行选档动作 (若当前档位跟目标档位在同一个选档位置, 选档操作可省略) , 确认换档拨头到达目标档位选档位置后, 换档电机执行挂档动作, 挂档动作又可分为3步, 第一步是从空档位置到目标档位同步起始点, 第二步是同步器同步过程, 第三步是锁止过程, 确认换档到位后, 离合器执行机构执行结合离合器的动作, 确认离合器完全结合后, 换档过程结束, 车辆以新档位行驶。
3 挂档时同步过程控制策略
由于变速器相临两档位传动比的不同, 且档位越低, 传动比差值越大, 因此在挂档时同步器两端转速的差值不同, 所以, 同步器在同步时所需要的同步力也不尽相同。为了完成快速换档, 同时达到减小同步器磨损的目的, 在同步器的同步过程中需要控制同步力的变化。当换档位置到达同步起始点后, 进入同步器同步阶段, 换档电机进入同步力控制模式, 在同步开始时, 换档电机的占空比较小, 称为同步起始力;同步过程中不断增大电机的占空比, 同步驱动力逐渐增大, 而增大的占空比的比率称为同步累加力;当同步力增大到一定程度后便不再增大, 以恒定的驱动力完成同步过程, 同步过程最后阶段这个最大的力称为同步最大力。
同步器同步阶段, 换档控制程序根据目标档位、变速器油温、发动机转速等参数给出换档电机的同步起始力、同步累加力、同步最大力 (这里的力实际指的是换档电机的占空比) 。当同步器同步开始时, 换档电机以同步起始力驱动 (此时占空比较小) , 在同步起始力的基础上以累加力不断增大电机的占空比, 直到同步最大力为止;在换档电机从小到大的驱动力作用下, 同步器慢慢完成同步过程, 当传感器检测到同步器两端转速相同时, 同步过程结束。同步过程中同步力控制模型如图2所示。
4 同步器控制策略建模
5 控制策略实车验证
在MATLAB/Simulink中建好模型后, 应用Real-Time Workshop代码自动生成工具编译成AN-SIC语言代码, 在飞思卡尔Code Warrior软件中编译、连接、下载至TCU控制器中, TCU如图3所示。应用CANape软件及CCP协议建立TCU的数据监测及标定系统, 在CANape环境实时监测TCU内变量随时间变化的曲线。实验样车及使用的CANape工具如图4所示。经过实车验证, 并标定换档过程控制参数后同步器同步过程曲线如图5所示。
6 结论
电控机械式自动变速器为达到甚至超过传统手动式变速器的换档品质, 需要制定合理的控制策略, 并且需要标定换档过程中的控制参数。本文结合机械式自动变速器的特点, 制定了换档过程中同步器的控制策略, 并在实验车上进行了验证。
通过在搭载AMT的实车上进行验证, 结果表明本文制定的控制策略可以很好地满足汽车行驶过程中摘档和挂档的操作。
摘要:全电AMT执行机构的控制策略是AMT系统的关键技术。通过分析AMT执行机构特点及AMT的换档过程, 制定了AMT挂档同步过程的控制策略, 并在MATLAB/Simulink软件中建立了控制策略模型, 最后在装载AMT的样车上进行了实车验证。结果表明该控制策略能够有效地控制AMT挂档时同步器的同步过程。
关键词:AMT,控制策略,同步过程,实车验证
参考文献
[1]原果田.DC12J180AMT自动变速器产业化研发[J].机械工程与自动化, 2011 (6) :76-78.
[2]葛安林.自动变速器 (六) —电控机械式自动变速器[J].汽车技术, 2001 (10) :1-4.
[3]万国强, 黄英, 张付军, 等.液力自动变速器换档过程标定方法研究[J].兵工学报, 2012, 33 (2) :142-148.
公司治理与IT治理
IT治理的提出,一方面是因为信息已经成为企业最为宝贵的资产,IT在组织中已经扮演一个影响到组织全局、影响到治理层面的角色,另外一方面与全球瞩目的焦点难题—— 公司治理亦有着深刻的渊源。那么IT治理和公司治理到底是什么关系呢?
众所周知, 公司治理问题一直是企业制度与组织的核心问题。近年来,因上市公司频频“惊曝黑幕”,“公司治理”成为全球性的问题。从美国的安然、世通、施乐等粉饰业绩甚至导致企业崩溃的案件,到日本雪印食品公司舞弊案件,都使得公司治理正在成为企业议事日程中最重要和最迫切的任务。公司治理是一种对公司管理和运营进行监督和控制的体系。它的核心是在所有权和经营权分离的条件下,解决好所有者和经营者的利益不一致而产生的委托—代理关系。其目标是降低代理成本,使所有者不干预公司的日常经营,同时又保证经理层维护股东的利益,实现公司价值和利益的最大化。
IT治理就是公司治理的一部分。来自国际信息系统审计与控制协会 (ISACA)对IT治理的定义:IT治理是一个由关系和过程所构成的体制,用于指导和控制企业,通过平衡信息技术与过程的风险、增加价值来确保实现企业的目标,
笔者从国内著名的管理咨询公司AMT咨询了解到他们一般都使用上述表述来定义IT治理,并指出,IT治理必须与企业战略目标一致。IT治理和其它治理主体一样,是管理执行人员和利益相关者的责任。研究IT治理,须将其放在组织背景中,将其看作是必须通过治理而产生价值地六种关键资产(人力、财务、实物、知识产权、IT、关系)之一。
IT治理和IT管理
提到I T治理,很多人难以区别IT治理和IT管理。IT管理是公司的信息及信息系统的运营,确定IT目标以及实现此目标所采取的行动;而IT治理是指最高管理层(董事会)利用它来监督管理层在IT战略上的过程、结构和联系,以确保这种运营处于正确的轨道之上。可见,IT管理就是在既定的IT治理模式下,管理层为实现公司的目标而采取的行动。
IT治理规定了整个企业IT运作的基本框架,IT管理则是在这个既定的框架下驾驭企业奔向目标。缺乏良好IT治理模式的公司,即使有“很好”的IT管理体系(而这实际上是不可能的),就像一座地基不牢固的大厦;同样,没有公司IT管理体系的畅通,单纯的治理模式也只能是一个美好的蓝图,而缺乏实际的内容。
IT治理的起源、发展历程
为了更好理解IT治理的内涵,需要追溯IT治理的起源,搞清楚IT治理的发展历程。我们将IT治理的发展划分为三个阶段,从1980年-我们称为准备阶段,这一阶段诞生了许多相关的IT治理框架模型、但是并没有一个全面清晰的IT治理概念的提出,还停留在对IT管理和控制框架的摸索中;19BIS的报告将IT管理和控制提高到了IT治理的层面,这个时候IT治理真正进入了起步阶段;SOX404条款的生效,促使企业将IT治理提高到了一个前所未有的高度。
2008年第29届奥运会中国以“绿色奥运, 科技奥运, 人文奥运”的理念申办成功。为这一目标的真正实现, 我国全民齐动, 各个领域都在为此不懈地做着自己的努力。我国人口众多, 交通工具的拥有量世界居前, 尤其是汽车的拥有数量, 几乎是以几何指数的形式陡增, 而汽车尾气的排放已成为不可忽视的重要污染源之一。目前世界上公认的最理想的绿色交通工具是电动汽车, 它以零排放、低噪声、舒适干净等特点得到了中国奥组委的青睐, 被确定为2008年第29届奥运会期间奥运村的专用交通工具, 它是以车载锂离子电池为能源、以交流电机产生动力的电动客车。
为满足不同工况的要求, 采用了多档变速器, 为减轻驾驶员换档的操作压力, 同时保证电机始终在理想的工作状态, 需要为奥运电动客车开发研制一种自动换档AMT系统。为此, 科技部和北京市成立了以北京理工大学机械与车辆工程学院为主研单位的“奥运电动客车自动换档变速操纵系统”重大专项研制课题组, 国营大众机械厂参与了该系统中“电子控制单元 (ECU) ”的研制、试验、生产及奥运、残奥期间的技术保障工作。
1选型
目前自动变速主要有以下3种方式:①无级变速方式 (AVT) ;②电控机械自动变速方式 (AMT) ;③机械式液力自动变速方式 (AT) 。为提高整车性能, 我们首先对其各自的优劣势进行了详细的分析, 最终选定AMT方式为奥运电动客车所用。AMT方式是在传统的手动机械齿轮变速器的基础上, 应用微处理器技术, 控制执行机构完成选位、换档、离合器等各项操作, 从而实现自动变速的功能。该项技术在保留了齿轮变速效率高、成本低、结构简单等诸多优点的基础上, 不仅增加了自动变速的功能, 且具有安全可靠、乘坐舒适干净、尾气零排放等优点, 完全符合“绿色奥运, 科技奥运, 人文奥运”的奥运会申办理念。
2AMT电子控制单元 (ECU)
ECU 单元结构见图1, 它是AMT系统的控制核心, 负责采集车辆的运行数据, 由车辆的运行状态判断驾驶员的意图, 并据此做出换档、驾驶模式、档位判断等决策, 并向换档和选位机构发出执行命令。ECU单元电路框图见图2, 其工作电源直接采用+24V车载直流电源。ECU单元是以Motorala公司的32位单片机MC68376为控制核心器件组成的一个典型的单片机控制电路, 以输入输出的形式分别对选位、换档执行机构和换档手柄的当前状态以及电机转速进行实时的录入和输出控制。由于在ECU单元中引入了CAN总线技术, 实现了AMT系统与交流电机控制器的数据传送, 因此实现了AMT系统对电机转速和转矩的控制, 不仅简化了系统设计, 降低了系统的制造成本, 同时还提高了ECU单元的集成度和可靠性指标, 改善了换档品质, 提高了整车的动力性和舒适 性。
3ECU单元的电磁兼容设计
在奥运电动客车上安装有空调、交直流电机、电子泵、逆变稳压器等多种电子设备, 客车运行中各种设备均有可能启动和停止, 而这些设备的各种状态的变化都会产生很强的电磁噪声, ECU单元置于这种恶劣的电磁环境之中, 势必会被干扰, 而它本身的电磁辐射同样会影响其它设备的正常工作, 所以必须对ECU单元进行电磁兼容设计。
首先, 元器件应尽量选用抗电磁干扰能力较强和宽温度工作范围的车用电子器件, 并尽可能地采用贴片电子器件, 以减少去耦电容供电回路面积, 减少分布电感的影响, 有效地降低器件引线电感所带来的产品自身的电磁干扰, 提高ECU单元自身固有的抗电磁干扰的能力。
PCB印制电路板的设计采用多层布板技术, 并将电磁兼容器件同步设计。一般晶振频率干扰最强, 所以电源、模拟地、数字地、晶振电路应合理布局, 尤其是地线网络的设计采用了大量的平行地线, 减少了地线电感和地线阻抗, 有效地减少了地线的噪声干扰。
箱体结构选用导电、导磁性能良好的合金铝, 整体加工, 接口处采用多折、屏蔽、隔离、接地、密闭等设计理念, 以保证静电感应在箱体上的电荷得以及时地卸放。
连接电缆完全按照军用电缆的要求进行全屏蔽加工, 使得电缆屏蔽层与箱体构成完全的屏蔽体, 保持箱体和电缆导电的连续性, 使来自外部任意一点的电磁干扰均可直接导至接地点, 有效地减少了共模干扰电流和差模干扰电流对ECU单元的影响。同时ECU单元也不会对环境产生电磁污染, 影响其它设备的正常工作。
由于在设计的初期就同步进行了电磁兼容设计, 并采取了相应措施, 所以AMT系统ECU单元的电磁兼容试验完全满足了“电动公交客车电磁兼容技术规范”的要求。
4生产过程的质量控制
在完成开发研制、样机生产后, 50台奥运电动客车AMT系统ECU产品于2008年初在国营大众机械厂投入生产;ECU产品出厂前全部进行了高温和低温试验, 并抽取一定数量进行了冲击、振动和潮湿试验, 均符合ECU产品验收规范的要求。2008年7月奥运电动客车AMT系统ECU产品50台已随整车完成安装调试, 奔驰在奥运村的专用公交线路上。奥运和残奥期间, 工厂又派出技术人员进行了全程的技术保障, 实现了“绿色奥运, 科技奥运, 人文奥运”的美好愿望。
摘要:实现“绿色奥运, 科技奥运, 人文奥运”的目标, 需要研制、生产纯电动客车。该车采用了自动机械换档系统 (AMT) 。由于纯电动客车为强电环境, AMT电子控制单元 (ECU) 必须进行电磁兼容设计, 以满足AMT的系统要求。实践表明, 满足电磁兼容设计的AMTECU工作正常, 为奥运提供了合格的产品, 得到了用户的高度好评。
关键词:电动客车,电子控制单元 (ECU) ,电磁兼容设计
参考文献
CSAMT法与AMT法是两种常用而有效的深部找矿方法。为了在广西某矿区找接替资源, 摸索一种有效的探测方法, 在该矿区利用了美国Zonge公司研制生产的GDP-32和美国EMI公司和Geometrics公司联合推出的新一代电磁仪EH-4型StrataGem电磁系统进行了深部勘测。通过数据处理和解释, 对比两种方法找矿效果, 查明了岩体界面和构造特征, 为进一步勘探工作提供地球物理参考。
2矿区地质及地球物理特征
2.1矿区地质概况
本区处于湘南南北向构造带与南岭东西向构造带中段北缘截接部位, 该区复式向斜的北部扬起端西侧。
(1) 地层
测区主要出露寒武系边溪组、泥盆系、下石炭统。
寒武系边溪组出露于矿区西部金竹源顶~白马垒一带, 主要为浅变质砂岩、板岩和泥质灰岩。
泥盆系在测区大面积出露, 与寒武系呈不整合接触, 分下、中、上统。
下统莲花山组为砾岩、砂砾岩、砂岩, 局部粉砂岩, 厚约500米;下统那高岭组为泥质砂岩、粉砂质页岩, 厚约170米;中统郁江组为石英砂岩夹薄层页岩, 厚约210米;中统东岗岭组为薄层白云质灰岩、泥质灰岩夹燧石结核, 厚约430米;上统容县组为隐晶质灰岩, 白云质灰岩、局部夹泥质条带灰岩, 厚约380米。
(2) 构造
(1) 褶皱构造
测区位于该区复式向斜的北部扬起端西侧。复式向斜南起莲花, 往北于本区扬起、收敛, 轴向近SN, 全长约60千米, 在本区自西向东发育。
(2) 断裂构造
测区断裂构造主要有NE、EW、SN向三组, 此外尚有NW向断裂。NE向断裂主要以黄关—观音阁、立新两条断裂带为主。SN向断裂主要分布在高山顶背斜边缘, 规模上一般较NE向断裂小, 延长几公里至几十公里, 在性质上既有张性也有压性, 山前断裂多为正断层, 而山前断裂的次一级断裂多为冲断层, 区内规模较大的SN向断裂有白马垒—平步垒断裂、井塘—殴寨山前断裂两条, 其两侧次一级SN向断裂发育, 如马路桥—狗头寨、虎头岭—荆田村、石柏山—水溪庙断裂等。EW向断裂主要有马眼—五指山、全会—马路桥两条断裂。
(3) 岩浆岩
矿区内岩浆岩主要为花岗岩体, 此外, 尚发育有沿断裂破碎带侵入的花岗斑岩脉和花岗伟晶岩脉。
花岗岩体侵入寒武系、泥盆系、石炭系中, 大部为隐伏岩体, 目前深部工程控制隐伏岩体面积约8平方千米。地表出露面积约1.5平方千米, 产于SN向、NE向断裂的复合部位, 呈岩株状产出, 主体沿SN向断裂构造侵入泥盆系、石炭系中, 并形成数个南北向分布的岩株群。在寒武系中, 均为隐伏侵入。资料显示, 区内岩体在深部主要受EW向老基底断裂控制, 而浅部及地表明显受SN向断裂构造制约。
2.2地球物理特征
前人先后对本区地面的岩石和钻孔岩芯标本进行了电性参数的测定, 从多年的测定统计结果可以看出, 其所反映的岩石电阻率的变化规律是完全一致的。结果见表1。
从表中统计的区内各岩矿石电阻率ρ的结果来看, 各岩矿石电阻率ρ以构造破碎岩石的电阻率最低, 多在500~700Ω·m之间;其次是花岗岩类岩石, 其电阻率在1000~1200Ω·m左右, 其余岩石电阻率明显大于上述两类岩石。其值均在其4~5倍以上, 具有明显的差异, 可通过电法测量花岗岩类岩石和构造破碎岩石区分出来。
电性参数表明区内地下各岩矿石电性相比较共分为三个级别, 最低者为:构造破碎岩石, 电阻率在700Ω·m左右;次者为花岗岩类岩石, 电阻率在1100Ω·m左右;最高者为:沉积与变质岩类。三者之间具有明显的电阻率差异, 为本区投入电阻率类方法确定构造与岩体奠定了地球物理前提。
3 CSAMT、AMT方法原理
3.1 CSAMT方法原理
可控音频大地电磁 (CSAMT) 法是在大地地磁 (MT) 基础上发展起来的一种人工源频率域电磁测深法。它人工向地下供入音频谐变电流建立电磁场, 并仿照MT法观测正交电场和磁场分量, 计算卡尼亚 (视) 电阻率, 以探测地下电性分布。当从高到低逐个改变频率, 每个频率相应获得一个卡尼亚视电阻率, 从而得到卡尼亚视电阻率随频率而变化的曲线。
式中, ρz卡尼亚视电阻率, EX、HY分别为电场分量和与之正交的磁场分量。ϕZ为阻抗相位, ϕEx、ϕHy为EX和HY的相位。μ是大地的磁导率, 通常取μ0=4π×107-H/m。在音频段 (n×101-~n×103HZ) 逐次改变供电电流和测量频率, 便可测出卡尼亚视电阻率和阻抗相位随频率的变化, 完成频率测深观察。
3.2 AMT方法原理
音频大地电磁法 (AMT) 是20世纪60年代初, 由Strangway等提出。原理基于大地电磁测深 (MT) , 以天然交变电磁场为场源, 观测来自高空的电磁波在地球内部产生的感应电磁场, 研究地下电性结构的一种地球物理方法。与大地电磁测深 (MT) 频段不一样。
本次工作采用EH4型电磁系统, 它是利用宇宙中的太阳风、雷电等入射到地球上的天然电磁场信号作为激发场源, 又称一次场, 该一次场是平面电磁波, 垂直入射到大地介质中, 由电磁场理论可知, 大地介质中将会产生感应电磁场, 此感应电磁场与一次场是同频率的, 引入波阻抗Z。在均匀大地和水平层状大地情况下, 波阻抗是电场E和磁场H的水平分量的比值。
式中:f是频率 (Hz) ;ρ是电阻率 (Ω⋅m) ;E是电场强度 (mv/km) ;H是磁场强度 (nT) ;ϕE是电场相位, ϕH是磁场相位, 单位是mrad。必须提出的是, 此时的E与H应理解为
一次场和感应场的空间矢量叠加后的综合场, 简称总场。在电磁理论中, 把电磁场 (E、H) 在大地中传播时, 其振幅衰减到初始值1e时的深度, 定义为穿透深度或趋肤深度
由 (4) 式可知, 趋肤深度 (δ) 将随电阻率 (ρ) 和频率 (f) 变化, 测量是在和地下研究深度相对应的频带上进行的。一般来说, 频率较高的数据反映浅部的电性特征, 频率较低的数据反映较深的地层特征。因此, 在一个宽频带上观测电场和磁场信息, 并由此计算出视电阻率和相位。
4数据处理
4.1 CSAMT数据处理方法
CSAMT数据处理与反演采用美国Zonge公司GDP-32仪器配置的scsinv处理软件。在数据预处理方面, 观测数据还进行了畸变点剔除、曲线圆滑等工作。数据处理时还进行了近场、静态校正, 根据本区实际情况, 反复试验选择了参数。处理后利用surfer、mapgis软件绘制了各条测线的视电阻率拟断面图。
4.2 AMT数据处理方法
野外采集的时间序列的数据进行预处理后, 再现场进行FFT变换, 获得电场和磁场虚实分量和相位数据, 并现场进行一维BOSTIC反演。在一维反演的基础上, 利用EH-4系统的二维成像软件进行快速自动二维电磁成像。为了提高分辨率, 二维电磁成像的系数选为0.5, 同时选择较小的像素, 使反演数据得到加密, 从而突出相对微弱低阻异常。
对反演得到的数据在XZ平面上进行Kringing网格化, X轴和Y轴采用各向异性的方法进行半径搜索, 从而满足电性各向异性的实际情况。
5异常解释与效果对比
此矿区矿脉体产于第三幕花岗岩凸起外带的灰岩、大理岩中, 严格受近南北向压扭性构造裂隙和近东西向张性裂隙制约, 所以寻找花岗岩体凸起、探明构造是该矿区深部找矿的关键。
5.1 A号勘探线
图3为A线大地电磁测深 (EH-4) 、CSAMT电阻率二维反演结果与地质剖面对比图。从大地电磁测深 (EH-4) 电阻率反演结果图看, 剖面电性似层状分布, 从地表至标高-300米为一中低阻电性层, 电阻率幅值10~1200Ω·m, 岩性主要为第四系、灰岩、大理岩及炭质灰岩等;标高-300米以下为中高阻电性层, 电阻率幅值1500Ω·m以上, 岩性主要为花岗岩。目前控制的花岗岩岩体界面 (0~20号点) 主要位于电阻率800~1500Ω·m的电性等值线上, 根据电性分布特征及CSAMT电阻率反演结果, 推断从20至34号点剖面岩体顶界面深度从标高-300米增至标高约-700米。
A线CSAMT电阻率二维反演结果与大地电磁测深 (EH-4) 反演结果相似, 剖面电性似层状分布, 从地表至标高-400米为一中低阻电性层, 电阻率幅值10~1200Ω·m, 标高-400米以下为中高阻电性层, 电阻率幅值1500Ω·m以上。剖面0~30号点岩体顶界面已大致确定, 其基本分布于800~1500Ω·m电性等值线上, 由此推断30~40号点岩体顶界面应位于1500Ω·m左右的电性等值线上, 即岩体顶界面埋深标高从30号点的-300米增至40号点-700米左右。
通过A线EH-4、CSAMT电阻率二维反演结果与已知剖面钻孔资料对比分析, 两种方法推断的岩体界面位置与资料相吻合, 验证了方法的有效性。此处由于是靠近矿区, 受工频等干扰较大, CSAMT电阻率断面图在构造相应位置表现出非常明显的低阻异常, 异常特征很好地反映了构造的特征;而AMT电阻率断面图在构造相应位置处虽然出现相对明显的低阻异常, 但相比CSAMT, AMT反映构造特征不是很明显。说明CSAMT抗干扰能力强于AMT, 在干扰因素比较多的地方宜采用CSAMT法进行观测。
5.2 B号勘探线
图4为B线大地电磁测深 (EH-4) 及CSAMT电阻率二维反演结果和地质剖面对比图, B线剖面岩体顶界面埋深已大致由钻孔控制, 其中, AMT14号点位置的钻孔确定的顶界面在标高约-200米处, 比其他钻孔确定的界面深。
B线EH-4和CSAMT电阻率反演结果显示, 剖面电性似层状分布, 上部中低阻电性层岩性主要为第四系、灰岩、大理岩及炭质灰岩等, 下部中高阻层即为岩体。已知岩体顶界面主要分布于800~1500Ω·m电性等值线上, 由于受高阻的大理岩影响, 部分岩体界面分布于较高的、电阻率为5000Ω·m左右的电性等值线上。结合钻探资料结果与电性分布情况, 推断岩体界面应分布于电阻率为5000Ω·m左右的电性等值线上, 从大地电磁测深 (EH-4) 电阻率二维反演结果图可以看出这条等值线位于标高-200m左右, 一条V字形连线, 而CSAMT电阻率二维反演图反映出的岩体分界面没有AMT明显。
6结束语
(1) CSAMT法与AMT法勘探深度大, 能够很好反映出岩体分界面, 构造特征, 具有很好的找矿效果。
(2) AMT法受工频等干扰影响较大, 在干扰因素较多的地方, 对构造、矿脉反映不如CSAMT法明显。
(3) 在地势平坦、干扰较少的地方, AMT法比CSAMT法更能反映出岩体分界面。
(4) CSAMT法采用人工源, 仪器较为笨重, 在地势复杂的山区, 发射源位置难以确定。AMT仪器较轻便, 工作容易开展。在地势较平坦地区, CSAMT排列式布点的工作效率要比AMT高。
参考文献
[1]汤井田, 何继善.可控源音频大地电磁法及其应用[M].长沙:中南大学出版社, 1999.
[2]朱金华, 冒我冬, 白锦琳, 李华.CSAMT法在断层含水性评价中的应用[J].物探与化探, 2011.
[3]石昆法.可控源音频大地电磁法理论与应用[M].北京:科学出版社, 1999.
[4]杨积发, 涂善波, 李亚楠.CSAMT法在隐伏铝土矿探测中的应用[J].内蒙古石油化工, 2010.
[5]秦善强, 胡玉平, 赵雪平.AMT法在矿区金属矿勘查中的应用[J].长江大学学报, 2011.
[6]袁桂琴, 李飞, 郑红闪, 丁志强.深部金属矿勘查中常用物探方法与应用效果[J].物探化探计算技术, 2010.
[7]魏明君, 赵金洲, 杨长龙, 刘国庆, 宋双全.CSAMT在河南某铝土矿区深部勘查中的应用[J].物探与化探, 2011
关键词:起步,离合器,混合动力,AMT
0引言
将电控机械式自动变速器(AMT)技术应用在单轴并联式混合动力大客车上,使原来的变速箱控制单元(TCU)与整车控制单元(HCU)集成在一起,控制发动机、电机、离合器、变速箱的协调工作。动力源的增加一方面使得离合器控制变得更加复杂多样化,另一方面可以在特定情况下改善离合器的控制效果,传统的PID控制算法已经不能适应这种变化,为了达到离合器控制的要求,很多专家已经研究出新的控制方法。
李冬冬[1]建立的模糊控制器,可以根据专家经验推理出合理的接合速度去控制离合器的接合;罗文俊[2]研究的仿人智能控制理论可以利用计算机模拟人的控制行为功能从而实现离合器的自学习控制;唐娜娜等人[3]提出的优化控制方法可以在兼顾冲击度和滑磨功的前题下实现车辆的快速平顺起步;倪成群等人[4]提出的离合器接合过程中的动态转矩控制策略有效改善了整车的纵向冲击度,提高了整车驾驶性能。 以上控制方法都具有一定的可行性,但是计算量都比较大,会给离合器控制的及时性造成一定影响。本文研究对象是某单轴并联式混合动力大客车AMT系统的离合器,在已经成熟的增量式PID控制离合器的基础上,增加分段控制,计算简单,可以实现混合动力大客车的快速平稳起步。
1起步方式分析
单轴并联式混合动力大客车AMT系统的结构如图1所示。该车采用永磁同步电机辅助发动机工作, 并将其置于离合器与自动变速箱AMT之间,通过控制发动机和电机之间的离合器,使得该混合动力大客车的起步方式变得多样化。
混合动力大客车主要有3种起步方式:电机起步、发动机起步和坡道起步。
(1)电机起步。在高压电就绪之后,若SOC电池电量显示正常(30%~80%),则采用电机起步,此时发动机处于怠速状态,离合器分离。在切换到发动机工作之前,离合器将一直处于分离状态。离合器采用电机驱动气助力式执行机构,在气助力作用下将离合器分离到位之后电机不需要再进行工作,HCU只需控制电磁阀始终处于开启状态,离合器便在气缸压力的作用下保持分离,避免了离合器电机持续工作会产生过多热量的弊端,也提高了离合器执行机构的使用寿命。
(2)发动机起步。在电池电量不足或电机扭矩不足以克服整车阻力矩时,采用纯发动机起步方式,此时电机不参与工作。起步之前首先要启动发动机,发动机的启动有两种方式,一种是由发动机自带的起动机启动发动机,另一种是利用动力电机启动发动机。发动机起步时与传统AMT车起步情况类似,只是从动部分多了一个电机的自由转动惯量,根据油门踏板开度,又可分为慢起步、正常起步和快起步。
(3)坡道起步。在坡道上起步时,由于阻力较大, 通常需要发动机和电机同时工作以提供更大的驱动力。此时对离合器的控制不再是单体控制,还要控制发动机和电机的扭矩平衡。传统车辆坡道起步时,为了防止车辆溜车,离合器的半联动点控制就非常重要, 在本文研究的混合动力大客车上,需要根据坡度的不同确定半联动点的不同位置,使离合器接合控制更准确,坡道起步更加平顺。
2起步控制方法
2.1传统PID控制
根据控制量的不同,将离散化的PID控制分为位置式PID控制和增量式PID控制两种算法。位置式PID控制输出控制量的绝对值,它决定了控制机构的位置,其表达式如下:
其中:u(k)为第k次采样时刻的输出值;KP、KI、KD分别为比例系数、积分系数、微分系数;e(k)、e(k-1) 分别为第k次、第k-1次采样时刻输入的偏差值。该控制方法的控制量输出值与过去所有状态都有关,一旦输入信号受到干扰,u(k)就会出现较大偏差,导致控制机构位置的大幅度变化,这种变化有可能会对动力系统造成巨大的冲击。
增量式PID控制是相对位置式PID控制定义的, 它的执行机构接收的是控制量的增量,增量式PID控制可根据位置式PID控制递推得出其控制规律:
其中:Δu(k)为第k次的输出增量;u(k-1)为第k-1次采样时刻的输出值;e(k-2)为第k-2次采样时刻输入的偏差值。增量式PID控制的优势在于错误值不累加,输出值只是和最近k次取样有关,具有更好的控制效果,故本文采用增量式PID控制。
2.2分段PID控制
分段PID控制是在增量式PID控制的基础上增加分段控制区间而来的。离合器接合过程的控制系统是一个非线性时变系统,式(2)中的增量式PID控制采用一组固定的PID参数,难以保证离合器在各种状态下均能获得最佳控制效果。针对这种情况,本文增加分段控制区间,即根据误差的大小及其变化规律将离合器位置机构分为不同的区间,每个区间标定相应的控制参数。与传统的增量式PID控制方法相比,增加分段控制区间的增量式PID控制具有不同的参数组合,能适应各个阶段离合器的工作状态,从而可以达到更好的控制效果。
图2为典型二阶系统单位阶跃响应误差曲线。其中,Ⅰ、Ⅲ、Ⅴ、Ⅶ所表示的区域误差绝对值在减小,此时可采取保持等待控制;Ⅱ、Ⅳ、Ⅵ、Ⅷ所代表的区域误差绝对值在增加,此时可以根据误差大小采用不同的控制强度,误差越大,控制力度越大,从而抑制动态误差的存在[5]。
离合器的分段式PID控制模块如图3所示。位置误差e(k)和位置误差增量Δe(k)反馈到阈值判断模块,根据e(k)和Δe(k)所在的区间来确定PID参数的值。基本思路如下:
(1)比例系数KP可以加快系统的响应,同时提高系统的调节精度,所以当|e(k)|>M1或当|e(k)|> M2且e(k)Δe(k)>0时(M1、M2为设定的误差限值, 且M1>M2),要增加KP的值,使用控制器的最强修正作用。此时误差已经很大或者误差正在增加,需要用最大的控制量来减小误差。 当e(k)Δe(k)<0、 Δe(k)Δe(k-1)>0或e(k)=0时,说明误差值在趋于减小或者已经达到平衡,此时不需要对控制器进行修正。
(2)积分系数KI主要用于消除系统的稳态误差, 也影响到系统的调节精度。当|e(k)|≤ε时(ε为任意小的正实数),说明误差绝对值很小,此时加入积分项, 便可消除稳态误差。
(3)微分系数KD的作用是对偏差变化进行提前预报,以改善系统的动态性能。当e(e)Δe(k)<0且 Δe(k)Δ(k-1)<0时,说明误差处在极值,如果此时误差绝对值较大(即|e(k)|>M2),则考虑较强控制作用,增大微分系数KD的值;如果此时误差绝对值较小(即|e(k)|≤M2)时,则考虑较弱控制作用,减小微分系数KD的值。
3仿真验证
利用MATLAB/Simulink仿真平台建立离合器的起步控制模型,以电机起步和发动机起步为例,对混合动力大客车起步时离合器的分离和接合过程进行分析,得到的相关参数变化曲线如图4和图5所示。
从图4和图5中可以看出:电机起步时离合器分离速度快,发动机输出扭矩为零,车速变化平稳,冲击度较小;发动机起步时离合器总体上按照“快- 慢- 快”的规律接合,滑磨时间大约为1.9s,电机不输出扭矩,在发动机扭矩和离合器接合的作用下,电机转速增加,最终与发动机同步,车辆起步成功,冲击度也满足极限值要求。两种起步方式相比较,电机起步时冲击度更小,故舒适性较好;发动机起步时的动力性更好, 能在较短时间内加速。
4结论
机械式自动变速器( AMT) 具有结构简单、成本低、传动效率高的优点,可以利用现有手动变速器进行升级改造,适用于对成本敏感的微型乘用车和商用车 。
相比AT、CVT等变速器,发动机协调控制在AMT换挡过程中更加重要。目前TCU控制发动机的方法主要有两种: 1) 通过直接调节发动机节气门或外部强制断油来实现发动机扭矩协调控制的方法; 2) 通过通信协议将控制命令发送至ECU完成转速和扭矩控制。前者TCU不能充分利用发动机喷油量和点火提前角的修正功能,所以无法实现对发动机的快速精确控制。随着发动机控制协议和功能的逐渐开放,换挡过程中基于CAN通信的发动机转速、扭矩控制已成为趋势[1]。在AMT系统中引入CAN总线技术,实现TCU与车上其他电子控制单元的通信,可以更加高效的实现各系统间协调控制和数据共享、 降低整个系统的成本[2]。文中提出了一种利用TCU和发动机ECU通过CAN通信进行协调控制的换挡控制策略, 并进行了试验验证。
1发动机的CAN通信控制
AMT换挡前后需要对发动机进行实时的扭矩、转速控制,以达到平顺换挡与延长离合器寿命的目的。
非换挡时刻,发动机由ECU控制,当TCU判断车辆行驶状态满足换挡要求时,通过CAN通信介入发动机控制。根据J1939通信协议,传动系统对发动机的控制方式有转速控制和扭矩控制两种,同时TCU可接收ECU向总线发出的发动机扭矩、转速、水温等信息[3],来修正对发动机和离合器的控制。传动系统对发动机的转速、扭矩请求报文如表1所示。
TCU通过CAN协议中的TSC1TE报文来控制发动机扭矩、转速,override control mode priority为控制模式优先级,定义如下:
00: 最高优先级;
01: 高优先级;
10: 普通优先级;
11: 低优先级。
当TCU需要介入发动机控制时,将优先级提高,使得总线上其他控制器在保证行车安全的情况下让出控制权。
Override control mode为TCU请求的发动机控制模式,TCU根据需要可选择:
00: 禁用;
01: 转速控制———控制发动机转速调节至目标转速;
10: 扭矩控制———控制发动机扭矩调节至目标扭矩;
11: 转速 / 扭矩限制控制———根据TCU请求限制发动机转速或扭矩输出。
当TCU的控制请求优先级为总线上最高时,发动机ECU开始响应TCU控制,TCU根据离合 器控制策 略,对离合器执行机构和发动机进行协调控制。根据控制模式的不同,ECU控制目标值为报文中的Requested speed / speed limit或Requested torque / torque limit的数值。
2AMT与发动机的联合控制策略
a) 分离离合器阶段的联合控制
为缩短换挡时间,离合器的分离速度应尽可能提高, 同时也要注意发动机的联合控制,防止加载在发动机曲轴上的负载突然卸下后发动机飞车。此阶段使用发动机扭矩配合离合器分离控制来达到这一目的。
由于离合器传递扭矩和离合器位移存在非线性关系, 在发动机降扭过程中,离合器的位移需要根据发动机的实际扭矩调整。文中采用的策略是,发动机降扭矩与离合器分离同时进行,当发动机到达目标扭矩的同时,离合器分离至滑摩点。
b) 改变挡位阶段的联合控制
由于AMT系统换挡时间很短,可认为换挡前后车速保持不变[4]。为减小换挡后的转速差,TCU需利用离合器从分离到接合至滑摩点这一时间段进行发动机转速控制。目前通过通信对发动机进行转速控制的方法有两种, 1) TCU通过请求发动机扭矩间接达到控制发动机转速的目的; 2) 是TCU直接请求发动机转速,由ECU自行实现转速控制。现采用2) 方式对发动机转速进行控制。
由于变速器改变挡位有不同工况,故发动机转速控制也应有相应的控制策略。在正常升挡情况下,以输入轴转速为目标转速,减少离合器滑摩时间,提高换挡舒适性。 Kick Down降挡工况下,以输入轴转速为目标转速,并根据油门开度进行修正。适当提高发动机转速,以便合理利用离合器滑摩作用,尽快传递发动机扭矩,减少动力中断时间。发动机转速计算模块如图1。
c) 离合器接合阶段联合控制策略
离合器接合阶段的控制目标是,在保证冲击度不大于规定限值的同时尽可能减少接合时间,使车辆具有良好的平顺性和动力性。为此,转速调节切换至扭矩调节后,发动机目标扭矩以通过CAN总线获得的发动机实际扭矩为初始值进行扭矩控制。
在离合器接合阶段,扭矩模式控制发动机。目标扭矩值以驾驶员请求扭矩和发动机时间扭矩为参考,同时根据油门踏板开度进行扭矩增量的修正。发动机扭矩增量计算模块如图2。
3试验结果
基于某自主品牌手动挡车型开发了AMT样车,该样车基本参数如表2。
采用文中的执行机构和控制策略,完成了TCU控制软件开发和初步标定。图3、图4分别是40% 和100% 油门踏板开度下发动机协调控制试验结果。
TCU根据车辆行驶信息判断需要换挡时,首先进行发动机扭矩控制,图中在发动机控制模式由0转换为1时,系统进入该控制模式,TCU根据离合器分离的位置, 计算出请求发动机扭矩并发送至CAN总线,发动机ECU接收到该扭矩命令后,调节使发动机实际输出扭矩跟踪TCU请求扭矩。
离合器分离完成后,AMT进入选换挡阶段,图中发动机控制模式由1转换为2,此时发动机进入转速控制模式,目标转速为输入轴转速。发动机根据CAN线上TCU的转速命令进行转速控制。
当选换挡执行机构的动作结束并且发动机和输入轴转速差小于设定界限后,离合器开始接合。此时发动机控制模式由转速模式转为扭矩模式,并根据TCU的扭矩命令逐渐提升扭矩并协调离合器,完成离合器接合动作。
离合器完全接合后,整个换挡过程结束,TCU退出发动机控制模式,ECU根据车辆实际工况对发动机进行控制。
当驾驶员深踩油门踏板时,说明其对车辆动力性有较高要求,为使车辆有更高的加速度,此时需要根据换挡MAP图进行降挡,使发动机提高转速工作在扭矩最大的区间内。图4中可看出,通过发动机在换挡期间的转速控制,有效减少了离合器接合时的转速差; 在离合器分离和接合阶段的扭矩控制,对保持发动机工作的稳定性具有良好效果。
4结语
目前,AMT系统的主要难点之一即为发动机和AMT系统的协调控制。通过对发动机—变速箱CAN通信的分析,设计了基于CAN通信的发动机控制方法,试验表明, 该方法可实现AMT和发动机的协调控制,并取得了良好效果。
摘要:为满足机械式自动变速器(AMT)对整车动力传动系统协调控制的需要,分析了基于SAE-J1939标准的发动机控制报文,设计了AMT控制器(TCU)与发动机控制器(ECU)通过CAN总线进行协调控制的控制方法,根据换挡过程中的不同状态建立了对应的发动机控制策略,并进行了整车试验。试验表明,该控制方法可满足AMT系统换挡过程中对发动机进行协调控制的需求,与发动机协调配合的平顺换挡。
关键词:电动汽车,AMT,换档性能,测试系统
由于内燃机不能带载起动,低速下无法输出转矩,高速下最大输出转矩又急剧下降,因此其可用转速范围较窄,必须使用离合器和多档变速器解决上述问题才能使传统燃油汽车兼顾低速和高速行驶时对转矩的需求。电动汽车的驱动电机与内燃机相比,可带负载起动,在低速甚至起步瞬间都可以输出很大扭矩,转速范围也较大,更符合汽车理想的驱动特性要求,可将驱动电机与变速器直接相连,无需离合器,其倒档则完全由电动机反转实现,且因驱动电机本身具有调速作用,所以不需要设置过多前进挡位。对于目前的纯电动车来说,采用两档式变速器完全能满足电动车在城市运行情况的需要,而且结构简单,控制方便[1]。如果增加挡位数量,则变速器结构将变得复杂,成本增加的同时,换挡机构设计、选档机构设计、可靠性设计以及总布置设计等的设计难度大大增加。
电控机械式自动变速器(Automated Mechanical Transmission,以下简称AMT)在齿轮是机械变速器的基础上加装电控系统,实现自动换挡,搭配合理的换档控制策略,可获得优异的经济性和动力性,而且AMT具有效率高、成本低、易于制造等优点[2],无论是在传统汽车还是电动汽车,均有广泛应用。
换挡过程控制是自动变速器的关键技术,它要求换挡迅速、平稳、无冲击[3]。变速器换挡试验是检测变速器性能必不可少的流程[4]。搭建两档AMT换档性能测试系统,不仅可以验证AMT控制器的控制策略,而且还可对AMT换档性能进行评价,继而为实车应用提供第一手的测试数据,加快产品研发进程,对推动两档AMT在纯电动汽车上的应用起到重要作用。
1测试系统硬件总体架构
所开发的两档AMT换档性能测试系统利用加载装置模拟变速器使用环境,通过转速转矩传感器测量变速器的输入转速和转矩、输出转速和转矩,计算换档时间,分析换档冲击、传动效率,同时还可对变速器进行疲劳寿命测试。测试系统将被测两档AMT输入轴经由转速转矩传感器连接到与之匹配的驱动电机的输出端,输出轴通过转速转矩传感器连接到加载装置,将驱动电机控制器、AMT控制器和加载装置控制器连接到工控机,构成一个可模拟AMT实际运行环境的完整系统。测试系统总体架构组成框图如图1所示。
图中驱动电机经由转速转矩传感器连接到AMT的输入轴,AMT的两个输出轴分别通过转速转矩传感器连接到两边的加载装置。AMT控制器、电源管理系统和电机控制器通过CAN总线连接到工控机的CAN通讯接口板卡,用于获取各控制器的输出参数和实现对驱动电机、动力电源及加载装置进行控制。通过安装在工控机内部的多功能数据采集板卡采集各传感器的信号和控制加载装置。加速踏板、制动踏板、AMT档位等信号均由工控机输出的模拟信号代替,以便实现测试系统的自动化运行。
2基于虚拟仪器的测试系统软件设计
2.1虚拟仪器及Lab VIEW图形化编程环境
自从虚拟仪器问世以来,工程师们利用软件不断的设计出各种试验及控制用仪器,提高了产品质量,减少了产品开发周期,大大降低了生产成本[5]。目前在这一领域内,使用较为广泛的计算机语言是美国NI公司的Lab VIEW[6]。LabVIEW是一种采用图形化编程语言的开发环境,被认为是数据采集和控制的最佳软件之一[3],在工业、学术界广泛用做开发数据采集系统、仪器控制软件和分析软件。Lab VIEW语言用图形化编程代替文本编程,其执行程序的顺序由连接的方框图之间的数据流决定,而不像文本程序受到行顺序的约束。如图2所示为本测试系统变速器输入扭矩和输入转速参数实时采集进程的程序框图,程序结构及功能一目了然,直观易懂。通过采用图形化编程方法,使用户从复杂枯燥无味的文本编程中解放出来,无论是编程过程,或是使用过程,都更加便捷[7]。
2.2转速同步与档位判断
有了变速器的输入输出转速,可计算出变速器的传动比,根据传动比变化情况可判断当前变速器的转速同步时间、换档是否平顺以及换档策略是否准确。如图3为转速同步判断进程,如图4为档位判断进程。
2.3油门开度的设定和换档扭矩的测量
通过在变速器换档执行机构中设置扭矩传感器,在自定义的油门开度信号下,使系统自动运行,可获取换档扭矩参数实时变化情况。如图5为自定义油门开度和换档扭矩测量进程的程序框图。
2.4 CAN通讯协议解析
AMT控制器判断是否需要换档的依据来自于电机控制器,因此需要工控机通过CAN通讯卡连接电机控制器,对CAN通讯协议进行解析,进而从电机控制器获取电机转速、电机温度、控制器温度、故障码等参数,为电机供电的电池的电压、电流、电量等参数,以及实车运行时对应的车速、里程等信息。通过这些信息不仅可以判断驱动电机工作状况是否正常,同时也可掌握AMT换档的触发依据,进而判断换档策略是否正确。如图6为电机控制器CAN通讯协议解析进程的程序框图。
3人机交互界面设计
基于Lab VIEW开发了本系统的人机交互界面。该人机交互界面基于选项卡控件,以可切换的面板的形式,实现了直观友好的人机交互功能,主要设置了系统运行主控面板、变速器运行监测面板、电机运行监测面板及车辆运行监控面板等。系统运行主控面板如图7所示。主控面板主要包括用于控制驱动电机的控制按钮、状态指示灯、仪表表头、数字显示与输入控件等。变速器运行监测面板可直观显示变速器输入输出轴的转速和转矩变化曲线,进而更清晰地了解变速器换档过程中转速转矩变化情况。电机运行监测面板主要监测AMT换档电机的换档扭矩、驱动电机的油门输入信号及驱动电机控制器输出的整车参数等。车辆运行监控面板主要用于模拟汽车各种运行工况,并监控各种工况下整车参数的变化情况。
44结束语
两档AMT有利于提升纯电动汽车整车经济性、动力性和续驶里程,成本较低且不会过多增加传动系统的复杂程度,非常适合在纯电动汽车上推广应用。基于虚拟仪器开发平台Lab VIEW所开发的两档AMT换档性能测试系统实现了对驱动电机控制器、AMT控制器、加载装置等的有效控制,能够实时测量和直观展示变速器的输入、输出轴的扭矩、转速,对换档过程中的换档状态进行实时监控,系统人机交互界面友好,简单直观且操作简便,不仅有助于开展AMT产品开发,而且也可用于产品出厂检验、实验教学等场合。
参考文献
[1]周云山,周晶晶,蔡源春.纯电动汽车两挡自动变速器转矩控制及其换挡动态仿真[J].科技导报,2013(Z2):39-42.
[2]孙仲立.基于Labview的EMT变速器试验台架的研究[D].武汉:武汉理工大学,2012.
[3]孙鲁,吴光强,王雷雷,等.机械式自动变速器换挡过程标定系统设计[J].汽车技术,2012(5):5-9.
[4]米林,吴俊,谭伟.基于PAC的汽车变速器换挡试验台系统设计[J].重庆理工大学学报(自然科学),2014(2):11-15.
[5]倪小波.汽车机械式变速器性能试验台设计与研究[D].武汉:武汉理工大学,2013.
[6]孟庆军.汽车自动变速器数据采集及故障诊断系统设计[D].合肥:合肥工业大学,2009.
相关文章

据美国幼儿教育学者莉莲·凯茨研究发现,很多孩子在学习的过程中,会因为某些原因逐渐产生对学习的无能感,并因此而丧失自信心,给别人的感觉是,这些孩子什...
2025-09-21 35

孩子的学习问题一直牵扯着家长们的心,当父母们聚在一起就会忍不住互相道苦水,几乎每家的孩子学习都是本难念的经。随着期中考试的到来,父母的心又悬起来了...
2025-09-21 33 期中考试不及格要补考吗 期中考试不考的后果 期中考试没参加有什么影响么

篮球已经成为了孩子们的爱好运动之一,但是很多孩子没有经过专业的训练在打篮球的时候经常受伤,甚至由于缺乏专业的指导,而一直延续错误的动作和观念。因此...
2025-09-20 35 耀动体育教授怎么样 无锡耀动体育 耀东体育有哪些地方培训

众所周知,雅思考试是全球范围内受欢迎的英语能力考试之一。然而,对于许多学生来说,由于基础不够扎实,雅思考试成为了一座难以逾越的高山。如果你也面临着...
2025-09-20 22 雅思基础差 雅思没基础好学吗 雅思基础差的有保分班吗

想要提升英语能力,为留学英语考试做准备,欢迎你来了解无锡朗阁雅思!这是一家专注于留学考试培训的教育机构,拥有多年的教学经验,课程体系完善,教材内容...
2025-09-20 22 托福零基础 托福零基础备考如何准备 托福基础班适合什么程度的娃

不懂篮球的人认为篮球运动,就是10个人在追一个球跑,而懂篮球的则认为,篮球是世界上有魅力的运动,没有之一。很多小朋友和家长在接触了解篮球这项运动时...
2025-09-20 21 锻炼 身体 锻炼身体的项目有哪些? 锻炼身体下一句是什么


发表评论